

- By YIKONG
- 2025-03-10 13:40:56
- Техническая поддержка
Бескорпусной моментный двигатель: технические инновации и производственные проблемы шарнирного привода гуманоидного робота
1. Технические принципы и структурные инновации
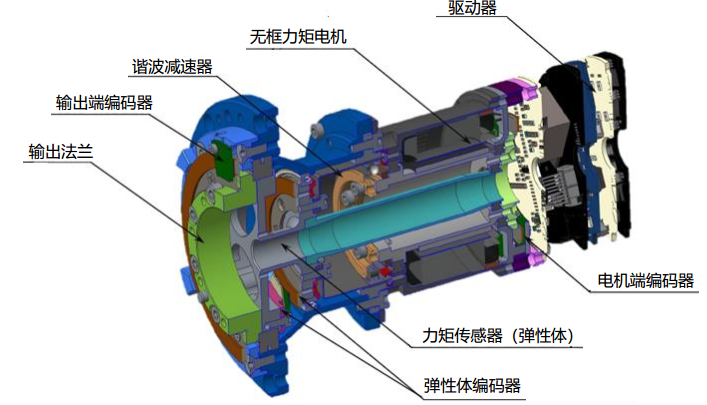
В бескорпусном моментном двигателе отсутствует корпус, подшипники и другие компоненты традиционного двигателя, оставляя только сердечник ротора (узел постоянного магнита) и статор (медная обмотка и стальной лист), а выходная мощность достигается за счет его непосредственного встраивания в механическую конструкцию. Его конструктивные особенности включают в себя:
Высокая плотность мощности: безрамная конструкция сокращает количество избыточных компонентов, уменьшает объем на 30–50 % и увеличивает плотность крутящего момента на 15–20 %.
Низкая инерционность реакции: ротор имеет низкую инерцию и короткое время реакции, что позволяет ему выдерживать мгновенные взрывные нагрузки, возникающие в суставах робота (например, при прыжках и беге).
Индивидуальная совместимость: поддерживает модульную конструкцию и адаптируется к различным размерам соединений (например, Tesla Optimus использует 28 бескаркасных моторизованных соединений).
Технические трудности заключаются в оптимизации магнитной цепи и проектировании отвода тепла. Например, немецкий TQ Robodrive использует 20-полюсную 18-слотовую компоновку магнитной цепи и повышает эффективность рассеивания тепла за счет эпоксидной заливки; В американской компании Kollmorgen используется 12-полюсная 39-пазовая конструкция для снижения пульсации крутящего момента и обеспечения плавной работы.

2. Сценарии применения: комплексное проникновение из промышленности в бионику
Основные сферы применения бескорпусных моментных двигателей расширились от традиционных промышленных роботов до областей высокой точности, таких как человекоподобные роботы и медицинское оборудование:
Суставы гуманоидного робота:
Из 28 сочленений Tesla Optimus бескорпусные двигатели отвечают за вращение и линейный привод, составляя около 15,4% стоимости каждого узла.
Совместный модуль Wolong Electric Drive объединен с технологией искусственного интеллекта для имитации характеристик движения человека и адаптации к задачам инспекции и спасения в сложных условиях.

Коллаборативные роботы: каждому коллаборативному роботу требуется 6–7 бескаркасных двигателей, а его компактная конструкция (минимальный диаметр 25 мм) обеспечивает высокую гибкость эксплуатации.

Медицинское и точное производство:
В хирургических роботах точность моторов может достигать микрометрического уровня, что позволяет проводить малоинвазивные операции;
В области станкостроения технология прямого привода устраняет механические ошибки передачи и улучшает повторяемость обработки.
3. Производственный процесс: прорыв в области точной обработки и локализации
Изготовление бескорпусных моментных двигателей подразумевает высокоточную механическую обработку и электромагнитное проектирование. Основные ссылки включают в себя:
Материалы и оборудование:
Процесс намотки и заливки:
В третьем поколении продукции компании Buke используется конструкция с раздельными лепестками обмотки и технология безрамной заливки для повышения эффективности рассеивания тепла и структурной стабильности;
Серия FM1 компании Leadshine Intelligent имеет плотность крутящего момента на 15% выше, чем у аналогов, за счет оптимизации скорости заполнения пазов обмотки.
Ход локализации:
Акции Buke занимают почти 50% доли внутреннего рынка, а наружный диаметр ее продукции составляет 52–132 мм, что позволяет адаптировать ее к потребностям различных сценариев;
Компания Leisai Intelligent выпустила 25-миллиметровый микродвигатель, который поступит в стадию опытного производства в 2024 году. Среди его целевых клиентов — несколько компаний, производящих человекоподобных роботов.
4. Конкурентная среда: возможности внутреннего замещения в условиях доминирования иностранного капитала
Зарубежные бренды: Kollmorgen (США), TQ Robodrive (Германия) и др. занимают рынок high-end, а их технические преимущества заключаются в моделировании магнитной цепи и стабильности процесса.
Отечественные производители:
Buke Co., Ltd.: Характеристики продукции третьего поколения соответствуют международным стандартам, а исследования и разработки четвертого поколения направлены на снижение веса и оптимизацию затрат.
Leisai Intelligent: Микроактуаторы и гуманоидные суставные модули поступили в опытную продажу, а план производственных мощностей на 2024 год уже определен.
Электропривод Wolong: в сочетании с технологией искусственного интеллекта разрабатывает бионические суставные системы и расширяет вертикальные сферы применения, такие как электроснабжение и медицинское обслуживание.
Перспективы рынка: Ожидается, что объем мирового рынка бескаркасных двигателей для человекоподобных роботов достигнет 6 млрд юаней в 2025 году и превысит 28 млрд юаней в 2030 году. Ожидается, что уровень внутреннего замещения увеличится с 30% до 50%.
。

5. Проблемы и будущие тенденции
Технические узкие места:
Плотность крутящего момента и надежность высококлассной продукции по-прежнему отстают от зарубежных брендов;
Требования к контролю за повышением температуры и индивидуальной настройке увеличивают сложность процесса.
Направление инноваций:
Конструкция с двумя статорами: например, запатентованное решение повышает ударопрочность за счет расположения внутренних и внешних статоров, что позволяет удовлетворить высокие требования к нагрузке промышленных роботов.
Интеллектуальная интеграция: интегрированная конструкция драйвера, энкодера и двигателя для снижения помех сигнала (например, объединенный модуль Haozhi Electromechanical)
Сотрудничество в отраслевой цепочке: компании, занимающиеся добычей магнитных материалов, и производители роботов, занимающиеся добычей и переработкой, совместно разрабатывают индивидуальные решения для ускорения реализации сценариев.
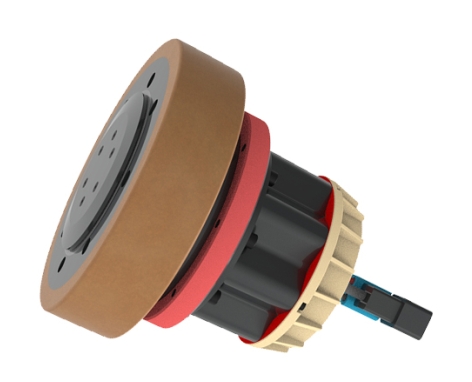
6. Сервоприводное колесо: скачок производительности безрамного моментного двигателя
Являясь интегрированным носителем бескаркасного моментного двигателя, наше сервоинтегрированное колесо глубоко интегрирует двигатель, драйвер, энкодер и корпус колеса, создавая компактный блок триады «мощность-управление-исполнение». Его основные преимущества заключаются в экстремальном использовании пространства и взрывной динамической реакции. Если взять в качестве примера типичную конструкцию с наружным диаметром 80 мм, то она может выдавать максимальный крутящий момент 150 Н·м и выдерживать динамическую нагрузку 100 кг, но при этом может устранить необходимость в традиционных редукторах и трансмиссионных конструкциях, тем самым увеличивая свободу компоновки шасси AGV или сочленений гуманоидного робота более чем на 40%.
Низкоинерционные характеристики безрамного крутящего момента двигателя сокращают время реакции колеса до уровня 2 мс. Будь то парковка складского робота с точностью ±0,1 мм на узкой полосе шириной 0,5 метра или мгновенное движение задним ходом гуманоидного робота, когда его лодыжка касается земли, можно добиться взаимодействия с управлением силой на уровне миллисекунд. Технология прямого привода дополнительно устраняет механические потери при трансмиссии и снижает потребление энергии на 15–20 % при той же нагрузке. В сочетании с интегрированным пакетом с уровнем защиты IP65 он может гарантировать более 20 000 часов бесперебойной работы даже в промышленных условиях с наличием пыли, масла или высокочастотной вибрации.
Что еще более важно, этот тип конструкции поддерживает многоколесную координацию и гибридное управление силой и положением посредством встроенных протоколов шины (например, EtherCAT). Например, при подъеме по склонам и преодолении препятствий система может в реальном времени распределять крутящий момент на каждое колесо, имитируя скоординированную силу биологических групп мышц; А в высокочувствительных сценариях, таких как хирургические роботы, точность позиционирования на микронном уровне и гибкие выходные характеристики позволяют даже восстановить рабочее прикосновение человеческих пальцев. Эта функция «аппаратного обеспечения как носителя алгоритма» переопределяет границы управления движением робота.
Заключение
Будучи «мышечной системой» человекоподобных роботов, технологические прорывы и усовершенствования производства бескаркасных моментных двигателей напрямую связаны с потолком производительности роботов. Хотя отечественные компании по-прежнему отстают в накоплении технологий и на рынках высокотехнологичных товаров, они постепенно разрушают монополию иностранного капитала посредством дифференцированных инноваций (таких как миниатюризация и высокая эффективность затрат) и сотрудничества в рамках промышленной цепочки. В будущем, с началом массового производства человекоподобных роботов с искусственным интеллектом, это направление может ознаменовать «цикл взрывного роста».