

- By YIKONG
- 2025-03-10 14:32:09
- Техническая поддержка
Анализ полевых данных AGV - мониторинг и обслуживание рулевого колеса
1. Отладка предыстории и информации о продукте:
Участок отладки: поточная линия автосборочного цеха на терминальной площадке;
Испытательные машины: транспортные средства AGV № 1, № 2 и № 8;
Параметры электродвигателя рулевого колеса: MRT20.0142 номинальная мощность 1000 Вт, номинальное напряжение 48 В постоянного тока, номинальный ток 26 А, пиковый ток 70 А, номинальная скорость 1700 об/мин, максимальная рабочая температура 110 градусов;
Параметры драйвера: максимальное напряжение 60 В постоянного тока, номинальный ток 60 А; пиковый ток 120А; максимальная рабочая температура 85 градусов;
Тяговый двигатель АГВ № 1 начал дымить.
2. Сводка данных мониторинга АГВ № 1, № 2 и № 8:
3. Предварительный анализ данных мониторинга нормальной эксплуатации:
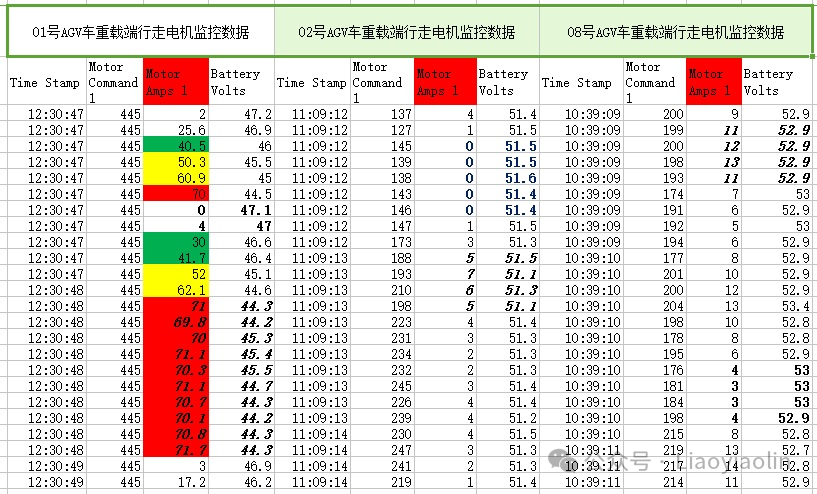
С помощью сводной таблицы данных мониторинга было установлено, что во время обычного прямолинейного движения ток двигателя колебался от нескольких ампер до более десяти ампер, что означает, что фактическая скорость нагрузки двигателя в это время составляет менее 50%, что свидетельствует о том, что выбор двигателя и привода соответствует требованиям прямолинейного движения.
В результате обобщения таблицы данных мониторинга было установлено, что при боковом движении кузова транспортного средства максимальный пиковый ток может достигать 70 А (данный параметр задается водителем), а нормальная продолжительность составляет менее 2 с. Это свидетельствует о том, что выбор двигателя и привода соответствует требованиям поперечного перемещения.
Из сводной таблицы данных нетрудно увидеть, что при нормальной работе влияние напряжения батареи на ток двигателя имеет решающее значение. Когда напряжение аккумулятора ниже 48 В, двигатель выдает достаточно большой крутящий момент, чтобы тянуть нагрузку в момент бокового перемещения, в результате чего выходной ток резко увеличивается. Даже в таких тяжелых условиях работы при низком напряжении перегрузка двигателя минимальна, что свидетельствует о том, что двигатель и привод способны справиться с максимальной выходной мощностью в условиях бокового движения.
Исходя из предположения о мониторинге данных трех двигателей в нормальном режиме работы, двигатели не будут перегреваться в нормальных условиях. В этом случае мы можем использовать температурный инфракрасный пистолет для контроля в ходе последующей отладки и производственного процесса. Когда транспортное средство AGV непрерывно работает более 20 минут (примерно время теплового баланса двигателя), самые высокие значения температуры, измеренные инфракрасной пушкой, плюс 5–10 градусов (примерно разница температур теплопередачи от обмотки двигателя к корпусу) близки к фактической температуре обмотки двигателя. Если значение меньше 110 градусов, то он может работать стабильно в течение длительного времени. Хотя двигатель AGV № 1 дважды дымил, в ходе последующих испытательных запусков никаких отклонений не наблюдалось, что свидетельствует о том, что работа двигателя по-прежнему надежна.
4. Анализ неисправности одного из двигателей на заводе-изготовителе и перегрева (дымления) при эксплуатации АГС № 1:
В существующих условиях невозможно проверить соответствующие данные двигателя с заводскими отклонениями, поэтому они не отвечают предпосылкам для анализа и суждения, поэтому они здесь опущены; Двигатель, перегревающийся во время работы, анализируется следующим образом, и возможны следующие варианты:
1. Двигатель заглох. Возможные причины включают неполное отпускание тормоза, приводящее к перегрузке двигателя.
2. Скорости двух двигателей не синхронизированы, что приводит к «лобовому столкновению» или «перетягиванию каната», что приводит к перегрузке двигателя.
3. Препятствия на земле стали причиной застревания колес и остановки двигателя. После аварийной остановки на некоторое время транспортное средство AGV самостоятельно тронулось с места и устранило нештатную ситуацию.
4. Направления движения двух ведущих колес не совпадают по прямой, параллельной или концентрической дуговой траектории, что приводит к снижению совокупной силы двух двигателей и перегрузке. AGV задымился после движения по прямой более 1 метра, поэтому эта нештатная ситуация также исключена.
5. Выходная мощность аккумулятора недостаточна, что приводит к увеличению тока двигателя, что в свою очередь приводит к его перегреву. Последующие испытания подтвердили, что это явление является серьезной проблемой с сохранением энергии в аккумуляторе. Последующие испытания также показали, что запас энергии в аккумуляторной батарее AGV № 1 недостаточен.
6. Неправильные настройки параметров привода или неисправности приводят к неконтролируемому току двигателя, что приводит к чрезмерному току двигателя без своевременной защиты. Примечание: такая ситуация более вероятна, когда привод намного больше двигателя.
7. Встроенная функция температурной защиты двигателя отсутствует или не используется.
8. На основании вышеприведенного анализа подтверждены следующие причины перегрузки двигателя: не используется функция температурной защиты двигателя; функции защиты драйвера от пониженного напряжения и ограничения тока не используются; и запас энергии в аккумуляторе явно недостаточен. Основной причиной дымления двигателя АГС № 1 следует считать одновременное наличие трех вышеперечисленных факторов. Устранение любого из трех факторов не приведет к перегрузке двигателя и появлению дыма.
5. Лечебные меры или предложения:

1. Пониженное напряжение драйвера установлено на уровне 44~45 В. При недостаточном уровне энергии аккумулятора скорость двигателя снижается, а выходной ток уменьшается (этот защитный механизм активируется водителем и не может быть сброшен). Другими словами, когда напряжение аккумулятора недостаточно, AGV движется медленно до полной остановки, чтобы защитить водителя, двигатель и аккумуляторную батарею.
Примечание: до того, как двигатель начнет дымить, на некоторых транспортных средствах AGV эта функция защиты не установлена. Рекомендуется выполнять разумные настройки при последующей отладке и эксплуатации.
2. Диапазон ограничения тока защиты драйвера должен быть установлен разумно. Текущая настройка — ограничение пикового тока 70 А, защита по ограничению тока 44 А и защита с задержкой 5000 мс. Когда выходной ток превышает 44 А и сохраняется в течение 5000 мс, драйвер отключает выход до тех пор, пока снова не поступит команда на включение.
Примечание 1: До того, как двигатель начнет дымить, на некоторых транспортных средствах AGV эта функция защиты не установлена! Рекомендуется выполнять разумные настройки при последующей отладке и эксплуатации.
Примечание 2: Такие параметры, как пиковый ток, защита от ограничения тока и время задержки, можно настроить и оптимизировать в ходе последующей фактической работы.
3. Функция защиты двигателя от перегрева не используется. До того, как двигатель начнет дымить, сигнал о перегреве двигателя не используется. Рекомендуется использовать эту функцию для эффективной защиты двигателя от перегрева.
4. Для точки 1 в четвертом пункте анализа ситуация на тот момент не может быть воспроизведена или восстановлена. Рекомендуется повторно проверить и подтвердить, что после вибрации машины нет плохого контакта или ослабления; для пункта 2 ситуация на тот момент не может быть воспроизведена или восстановлена. Рекомендуется контролировать постоянство скорости двух двигателей с помощью верхней компьютерной системы и своевременно вмешиваться, когда разница в скорости на прямой становится слишком большой; для проблемы траектории движения ведущего колеса, упомянутой в пункте 4, необходимо оптимизировать траекторию движения ведущего колеса или проблему согласованности тренда при последующей отладке; для пункта 5 рекомендуется вовремя заряжать и пополнять питание, когда запас энергии аккумулятора уменьшается, чтобы обеспечить нормальную и непрерывную работу транспортного средства AGV.